Matrix representation of symmetry operations
![]()
Using carthesian coordinates (x,y,z) or some position vector, we are able to define an initial position of a point or an atom.

The initial vector is submitted to a symmetry operation and thereby transformed into some resulting vector defined by the coordinates x', y' and z'. In an algebraic context, this transformation is expressed a matrix which processes the initial position vector. We write
final vector = Matrix * initial vector.
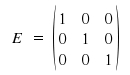
The most primitive symmetry operation is the identity and yields a final vector identical to the initial vector. It is the unity matrix or identity matrix which leaves all coordiates unaffected.
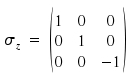
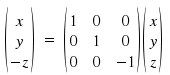
If we want to perform a reflection on the xy-plane (analogous to a horizontal plane σh), coordinate z changes the sign.
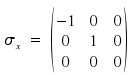
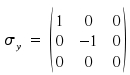
The matrices which are applied for performing a reflection on the yz-plane and xz-plane are the matrices σx and σy respectively.
The inversion i relates the coordinates (x,y,z) with (-x,-y,-z) and is connected with the following matrix:
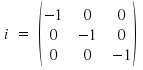
Obviously, a twofold application of the inversion matrix yields the coordinates of the initial point (x,y,z) which is reflected by E = i*i.

The matrix for a rotation about axis z by an arbitrary angle Θ is derived easily if we imagine two two-dimensional coordinate planes with identical origin but an angular difference of Θ between the axes. In our context of symmetry, we just need to deal with the discrete values of Θ = 2π/n for the angle of rotation.
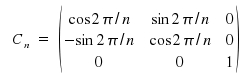
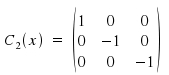
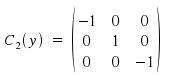
The matrices for the symmetry operations C2(z), C3(z), C4(z), C5(z) and C6(z) are obtained easily. The matrices for Cnm as symmetry operation are calculated by an n-fold multiplication of matrix Cn. The symmetry operation C2 around axis x (x→x,y→-y, z→-z) and around axis y are (x→-x, y→y, z→-z):
As we know rotatory-reflection to be a combination of rotation and reflection, a matrix representation for this operation is easily to be derived. For instance, to obtain the matrix for rotatory reflection Sn(z) we multiply the matrices for the fundamental operations &sigmaz and Cn.

![]()
Auf diesem Webangebot gilt die Datenschutzerklärung der TU Braunschweig mit Ausnahme der Abschnitte VI, VII und VIII.